Servomotore DC di precisione 46S/185-8A

Funzioni basi di u servomotore DC: (altri mudelli, a prestazione pò esse persunalizata)
| 1. Tensione nominale: | DC 7,4 V | 5. Velocità nominale: | ≥ 2600 rpm |
| 2. Gamma di tensione operativa: | DC 7.4V-13V | 6.Blocking current: | ≤2.5A |
| 3. Potenza nominale: | 25W | 7. Corrente di carica: | ≥1A |
| 4. Direzzione di rotazione: | L'arbre di output CW hè sopra | 8. Spaziu di l'arbre: | ≤ 1,0 mm |
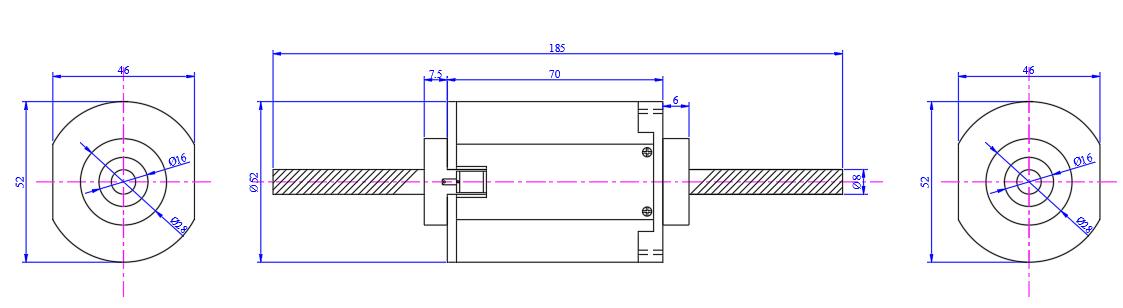
Diagramma di l'apparenza di u produttu
Tempu di scadenza
Dapoi a data di pruduzzione, u periodu di usu sicuru di u pruduttu hè di 10 anni, è u tempu di travagliu cuntinuu hè ≥ 2000 ore.
Caratteristiche di u produttu
1.Compact, cuncepimentu di salvezza di spaziu;
struttura cuscinetti 2.Ball;
3.Long vita di serviziu di spazzola;
L'accessu 4.External à i spazzole permette un sustitutu faciule per allargà più a vita di u mutore;
5.High torque di partenza;
6.Dynamic frenu à firmà più veloce;
7.Rotazione reversibile;
8.Simple cunnessione di dui fili;
9.Class F insulation, commutator saldatura alta temperatura.
10.High performance, high cost performance and low interference.
Applicazioni
Hè largamente utilizatu in i campi di a casa intelligente, i dispositi medichi di precisione, l'azzione di l'automobile, i prudutti di l'elettronica di u cunsumu, l'equipaggiu di massaggi è l'assistenza sanitaria, l'arnesi di cura persunale, a trasmissione robotica intelligente, l'automatizazione industriale, l'equipaggiu meccanicu automaticu, i prudutti digitale, etc.
Illustrazione di u rendiment



Sistema Servo: Hè un sistema di cuntrollu automaticu chì permette à e quantità cuntrullate di output cum'è a pusizione, l'orientazione è u statu di un ughjettu per seguità ogni cambiamentu in u target di input (o valore datu). U compitu principalu di u servo hè di amplificà, trasfurmà è regulà a putenza secondu e esigenze di u cumandamentu di cuntrollu, in modu chì u torque, a velocità è a pusizione di u dispusitivu di u drive pò esse cuntrullati in modu assai flexible è convenientemente.
Per via di a so prestazione "servo", hè chjamatu un servomotore. A so funzione hè di cunvertisce u segnu di cuntrollu di tensione di input in u muvimentu angulare di output è a velocità angulare nantu à l'arbulu per guidà l'ughjettu di cuntrollu.
Principiu di DC Servo Motor
U principiu di funziunamentu di u servomotore DC hè basicamente u listessu cum'è quellu di u mutore DC ordinariu. U torque elettromagneticu hè generatu da l'azzione di u flussu d'aria di l'armatura è u flussu magneticu di l'aria per fà rotate u servomotore. Di solitu, u metudu di cuntrollu di l'armatura hè utilizatu per cambià a vitezza cambiendu a tensione mentre mantene a tensione di eccitazione constante. A più chjuca hè a tensione, u più bassu hè a vitezza, è quandu a tensione hè zero, ferma a rotazione. Perchè quandu a tensione hè zero, u currente hè ancu zero, cusì u mutore ùn generà micca torque elettromagneticu, nè ùn pare micca u fenomenu di l'auto-rotazione.







