Servomotore DC di precisione 46S/12V-8A1

Funzioni basi di u servomotore DC: (altri mudelli, a prestazione pò esse persunalizata)
| 1. Tensione nominale: | DC 12V | 5. Velocità nominale: | ≥ 2600 rpm |
| 2. Gamma di tensione operativa: | DC 7.4V-13V | 6.Blocking current: | ≤2.5A |
| 3. Potenza nominale: | 25W | 7. Corrente di carica: | ≥1A |
| 4. Direzzione di rotazione: | L'arbre di output CW hè sopra | 8. Spaziu di l'arbre: | ≤ 1,0 mm |
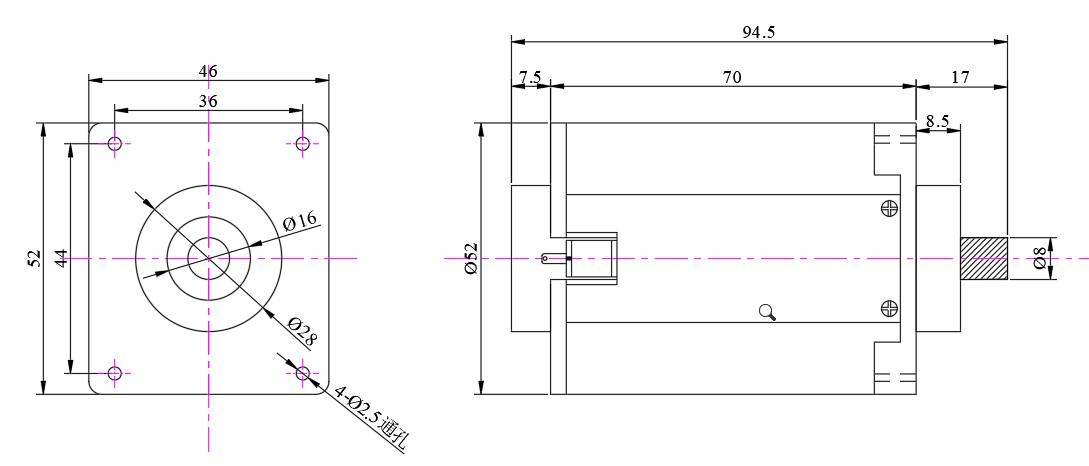
Diagramma di l'apparenza di u produttu
Tempu di scadenza
Dapoi a data di pruduzzione, u periodu di usu sicuru di u pruduttu hè di 10 anni, è u tempu di travagliu cuntinuu hè ≥ 2000 ore.
Caratteristiche di u produttu
1.Compact, cuncepimentu di risparmiu di spaziu;
2. Struttura di cuscinetti a sfera;
3. Longa vita di serviziu di spazzola;
4. L'accessu esternu à i spazzole permette un sustitutu faciule per allargà ancu a vita di u mutore;
5. Alta coppia di partenza;
6. Frenata dinamica per piantà più veloce;
7. Rotazione reversibile;
8.Simple cunnessione à dui fili;
9.Class F insulation, commutator saldatura alta temperatura.
10.With bassu rumore è funziunamentu stabile, hè soprattuttu adattatu per l'occasioni chì necessitanu alta vitezza è pocu rumore.
Applicazioni
Hè largamente utilizatu in i campi di a casa intelligente, i dispositi medichi di precisione, l'azzione di l'automobile, i prudutti di l'elettronica di u cunsumu, l'equipaggiu di massaggi è l'assistenza sanitaria, l'arnesi di cura persunale, a trasmissione robotica intelligente, l'automatizazione industriale, l'equipaggiu meccanicu automaticu, i prudutti digitale, etc.
Illustrazione di u rendiment



Chì sò e caratteristiche di u servomotore DC
In un servomotor DC ci hè un currente direttu (DC) cù terminali pusitivi è negativi.Trà ognuna di sti terminali, u currente scorri in esattamente a listessa direzzione.L'inerzia di u servomotore deve esse più chjuca per a precisione è a precisione.I servos DC anu una risposta rapida, chì hè ottenuta mantenendu un altu rapportu torque-to-weight.Inoltre, a caratteristica di a velocità di u servo DC deve esse lineale.
Cù un servomotore DC, u cuntrollu di u currente hè assai più simplice chè cù un servomotor AC perchè l'unicu requisitu di cuntrollu hè a magnitudine di l'armatura attuale.A velocità di u mutore hè cuntrullata da a modulazione di larghezza di impulsu (PWM) cuntrullata da u duty cycle.U flussu di cuntrollu hè utilizatu per gestisce u torque, risultatu in una coherenza affidabile in ogni ciculu di attività.
I servomotori DC tendenu à avè una inerzia più grande di i motori AC à gabbia di squirrel.Questu è a resistenza di friczione di a spazzola aumentata sò i fatturi principali chì impediscenu u so usu in servos di strumenti.In picculi dimensioni, i servomotori DC sò principarmenti usati in sistemi di cuntrollu di l'aeronautica induve e limitazioni di u pesu è di u spaziu necessitanu chì u mutore furnisce a massima potenza per unità di volume.Sò tipicamente usati per u travagliu intermittenti o induve hè necessariu un torque di partenza inusualmente altu.I servomotori DC ponu ancu esse aduprati in attuatori elettromeccanici, controller di prucessu, equipaghji di prugrammazione, robots d'automatizazione industriale, equipaghji di macchine utensili CNC, è parechje altre applicazioni di natura simili.
Un servomotore DC hè un assemblea custituita da quattru cumpunenti principali, vale à dì un mutore DC, un dispositivu di rilevamentu di posizione, un assemblea di ingranaggi è un circuitu di cuntrollu.A vitezza necessaria di un mutore DC dipende da a tensione applicata.Per cuntrullà a velocità di u mutore, u potentiometru pruduce una tensione chì hè appiicata à unu di l'inputs di l'amplificatore d'errore.







